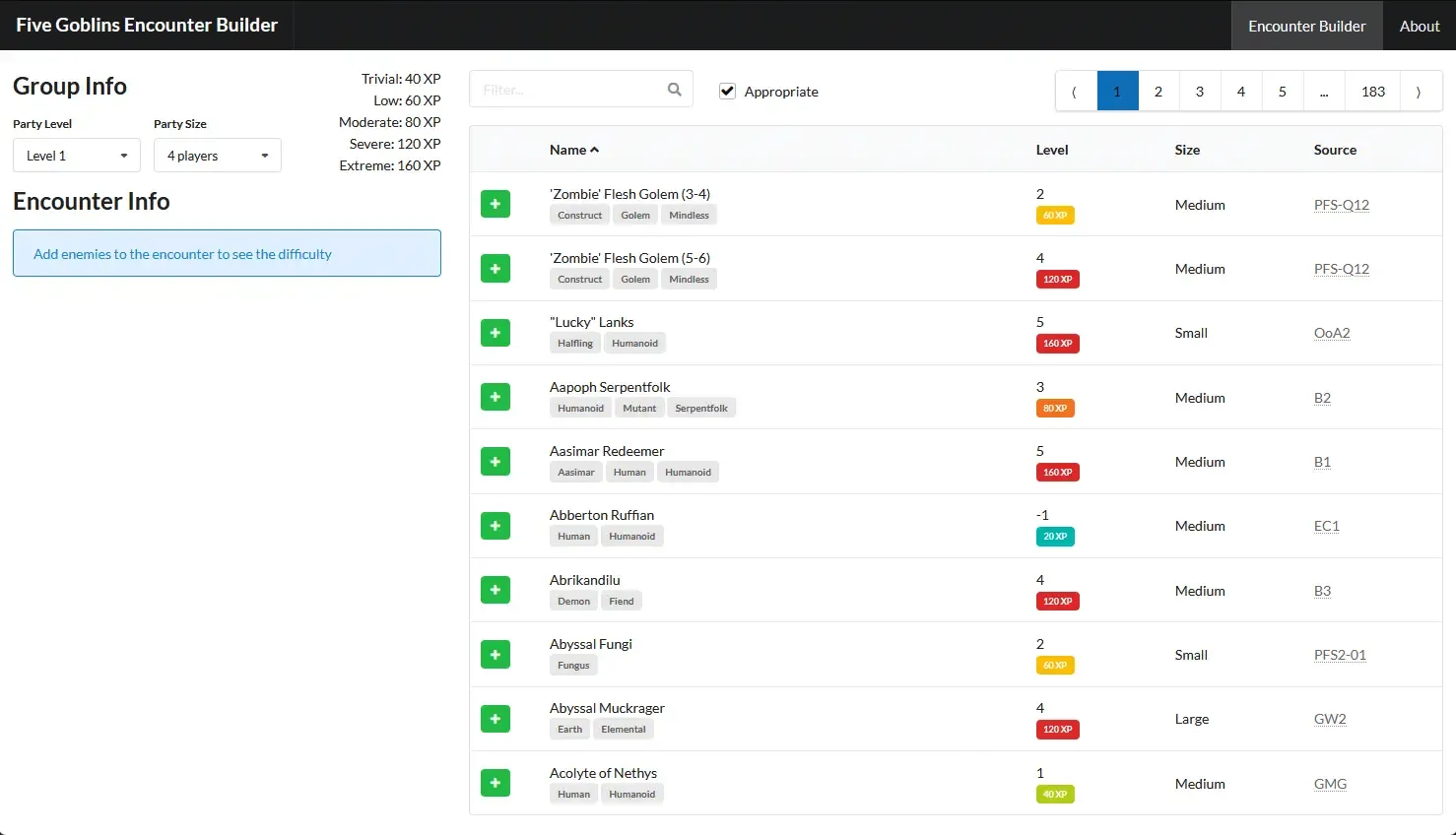
As part of investigating what things that are hosted on this website that people are actually using, I noticed a few people are still using the Pathfinder Encounter Builder that I created years ago. I have recently updated it to use React Hooks as well as gave it a shiny fresh coat of paint.
Five Goblins Encounter Builder
The naming was inspired by "Kobold Fight Club" which is a similar tool for Dungeons and Dragons which colloquially was called "KFC". Since "Five Guys" is another fast food restaurant, I decided to name it "Five Goblins" because goblins and kobolds are similar.
Additionally, I've created a script which will take the data from the PF2E system for FoundryVTT and extract it, so that the data now includes all of the creatures that have been created for the Pathfinder 2E system, instead of just the ones that were around when I created the tool.
Earlier this year, my web host (Dreamhost) forced me to upgrade my web server to the latest supported version of PHP (or else!), which was incompatible with the version of Wordpress I was running. Thankfully, they didn't just upgrade the server without telling anyone like what happened with the RoboGames website a few weeks before the event. I updated the version of Wordpress to the latest, but unfortunately the theme I customized wasn't compatible with that, so I just threw a default theme on the website temporarily. I also noticed that the price of website hosting increased quite a bit since I started. And $12 a month for shared PHP hosting seems crazy when they have a VPS for only $10. So I'd like to move to something that's not shared PHP hosting. Also, I've not really been super happy with Wordpress for things like upgrading and security vulnerabilities -- I found several files that had been overwritten with some kind of trojan I didn't bother investigating.
Another instigating factor is not really using Facebook or other Social media anymore. With reddit being awful now due to the API thing, I'm kind of sad that a lot of the things that could have been posted on my blog are now in the Facebook silo or on some private subreddit. So I want to bring my blog back up and running again -- and hopefully better maintained than it was before.
On October 1st, 2016 my dad and I are going to be running the first ever Botgeddon event. It's happening at the Rocklin Mini Maker at Sierra River College. For more information, go to http://botgeddon.com.
Last weekend, OkCupid has launched CrazyBlindDate, which is a website that allows you to go on blind dates with people in your area. There have already been a few discussions about it on Hacker News and other websites, so I'm not going to discuss the web site itself because most of those conversations have already been talked about. I checked out the site after getting an invitation in my inbox. On the landing page it presents you a list of people that you could go on a blind date with, which showed their first name, date and time of the date, a location, and a scrambled picture of the person. The reason a date is considered blind is because you don't know anything about your date, or what they look like. Providing minimal details about them is a good way to do this, and having some sort of picture of them to see that they are a real person.